 レビュー
レビュー 基板加工機
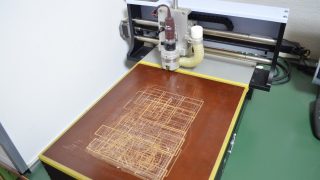
最近は格安基板メーカーも多いので個人で基板加工機を導入するメリットは大分薄くなっています。。。。それでも、簡単に基板を試作できるというのは非常に便利なものです。特にまとまった数量がいらない簡単な基板を加工する場合、とても役に立っています。実...
レビュー  電子工作
電子工作  マイコン
マイコン  電子工作
電子工作  MATLAB
MATLAB  MATLAB
MATLAB  KitMill
KitMill  コミックマーケット
コミックマーケット  Z80
Z80  ソフトウェア
ソフトウェア