 ロボット
ロボット ロボトレーサのサーボモータ変更とちょっとした改良
このロボトレマシンには2つのサーボ機構が搭載されています。ステアリング駆動サーボ、カメラ駆動サーボはそれぞれ確度センサとコアレスモータによって構成されています。 駆動用のモーターのスピードが上がるとステアリングサーボモータのトルクが不足して...
ロボット ロボット  ロボット ロボット ロボット
ロボット ロボット ロボット  ロボット
ロボット 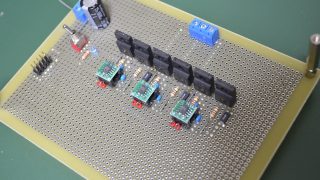 ロボット ロボット
ロボット ロボット  ロボット
ロボット