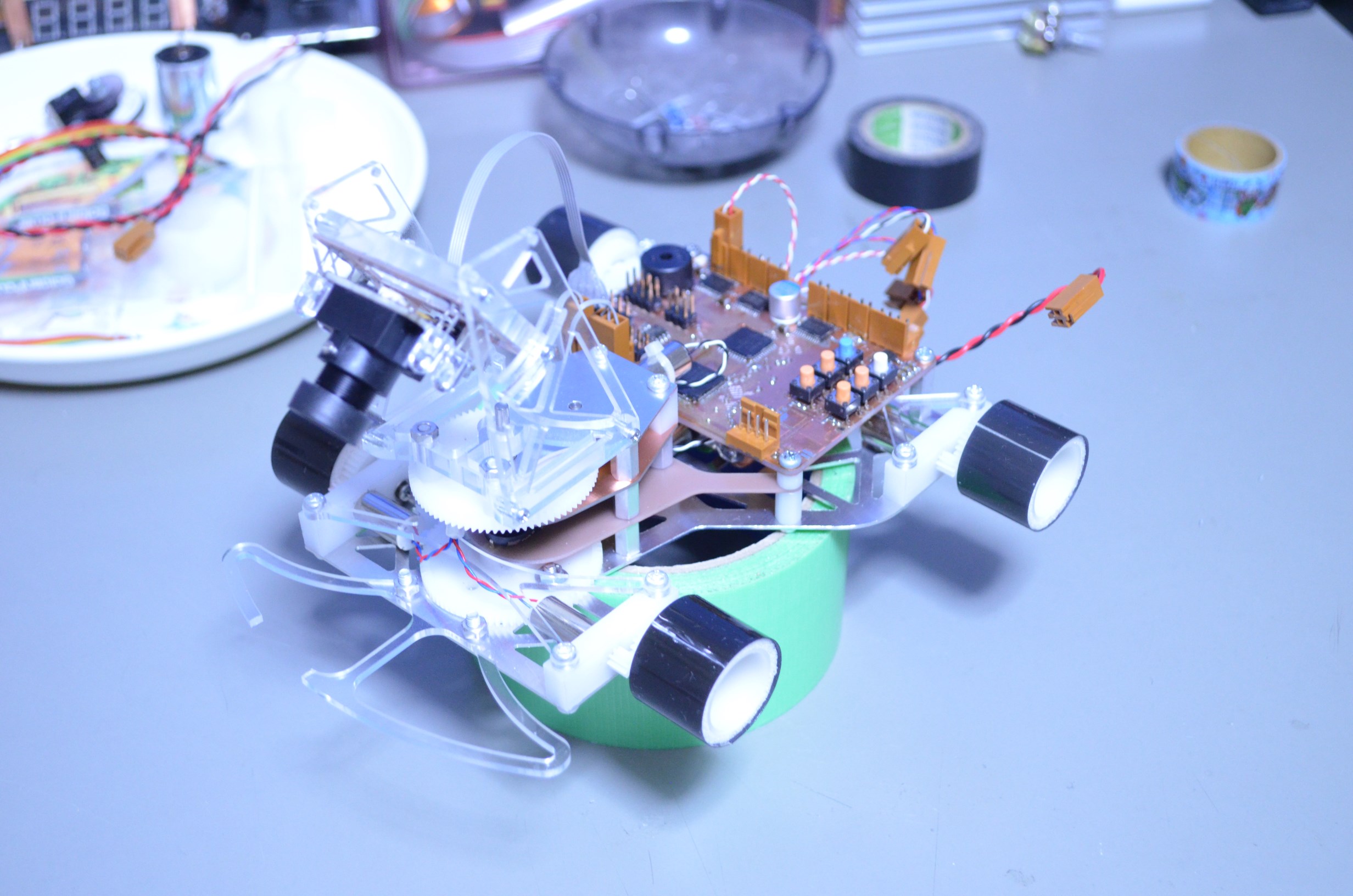
テスト走行 ロボット 2019.10.162019.12.09 R20と直線のコースを走らせて見た 車速の速度フィードバックしていないので一定のPWMでユーティで走行させています。ひとまず形になったので改良を進めていきます。
 ロボット
ロボット
コメント