久しぶりに動くもの作りたいなぁと思っているところでこんなものを見つけました。
ブラシレスモータを3個搭載してジャンプしたり静止したりするロボットのようです。
こんな構成でできないかと考えてみました。
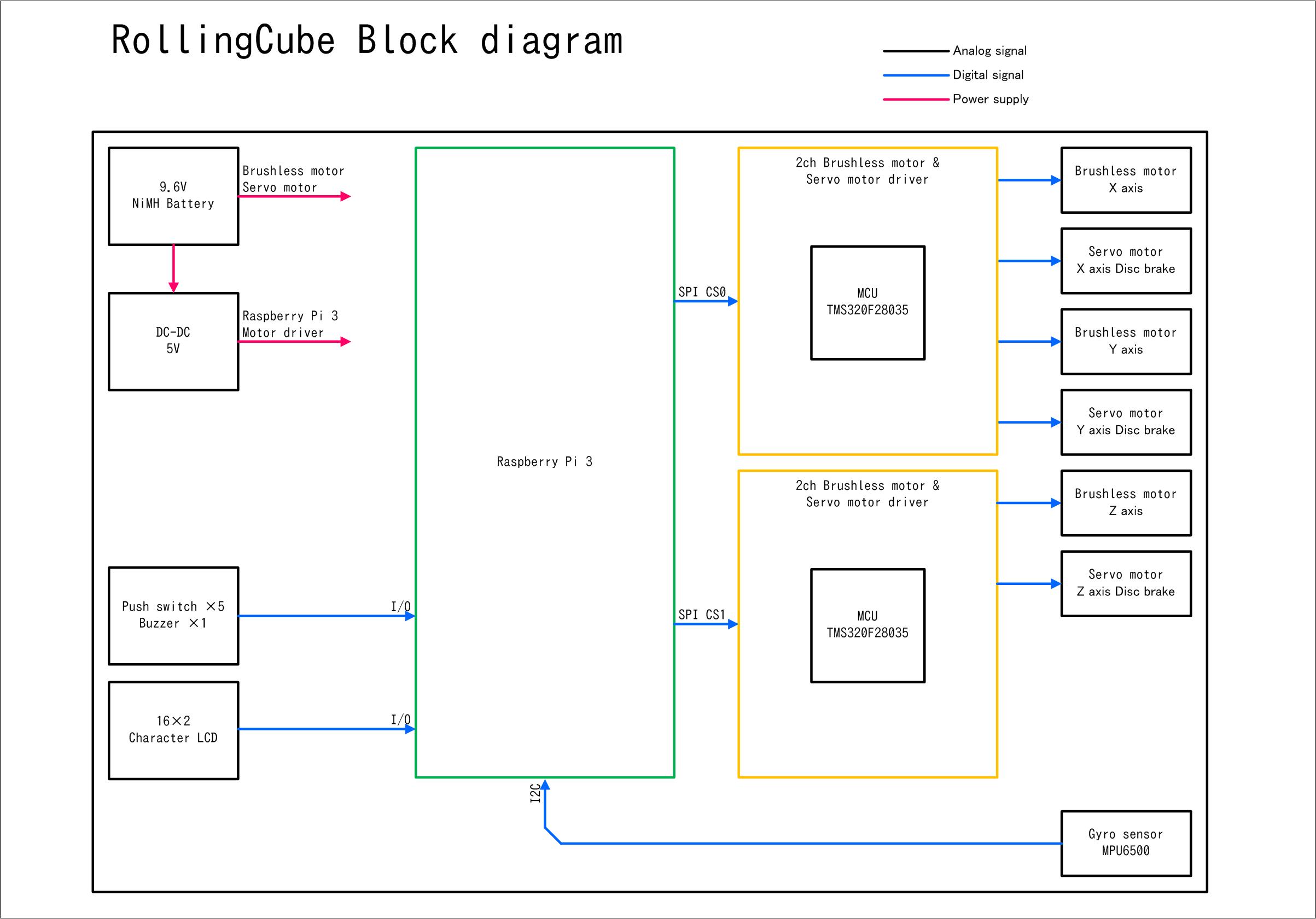
Raspberry PiにROS(Robot Operating System)を載せて制御できないかと考えています。
Raspberry Pi3ならBluetoothとかWiFも対応しているので外部制御する場合に都合がよさそうです。
全体はRaspberry Pi3でコントロールします。
ブラシレスモータは制御が複雑なため専用にサブマイコンを載せて制御しようと思います。
モータドライバはRaspberry Pi3からの指示を受けて速度制御をするような感じです。
まずはブラシレスモータドライバの開発から進めていこうと思います。


コメント