 Z80
Z80 Z80ワンボードマイコンを作ってみた
有名なZ80CPUを使ってワンボードマイコンを作ってみました。 Z80についてはZ80ワンボードマイコン ブロック図 Z80を最低限動作させるために必要な回路とROMのほかにRAM,PIO,CTCが1枚の基板上に構成されています。 Z80ワ...
Z80  ロボット
ロボット  ロボット ロボット ロボット
ロボット ロボット ロボット  電子工作
電子工作  ロボット
ロボット 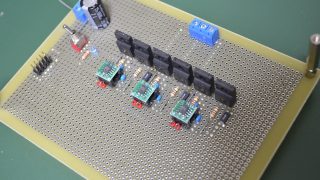 ロボット ロボット
ロボット ロボット  ロボット
ロボット