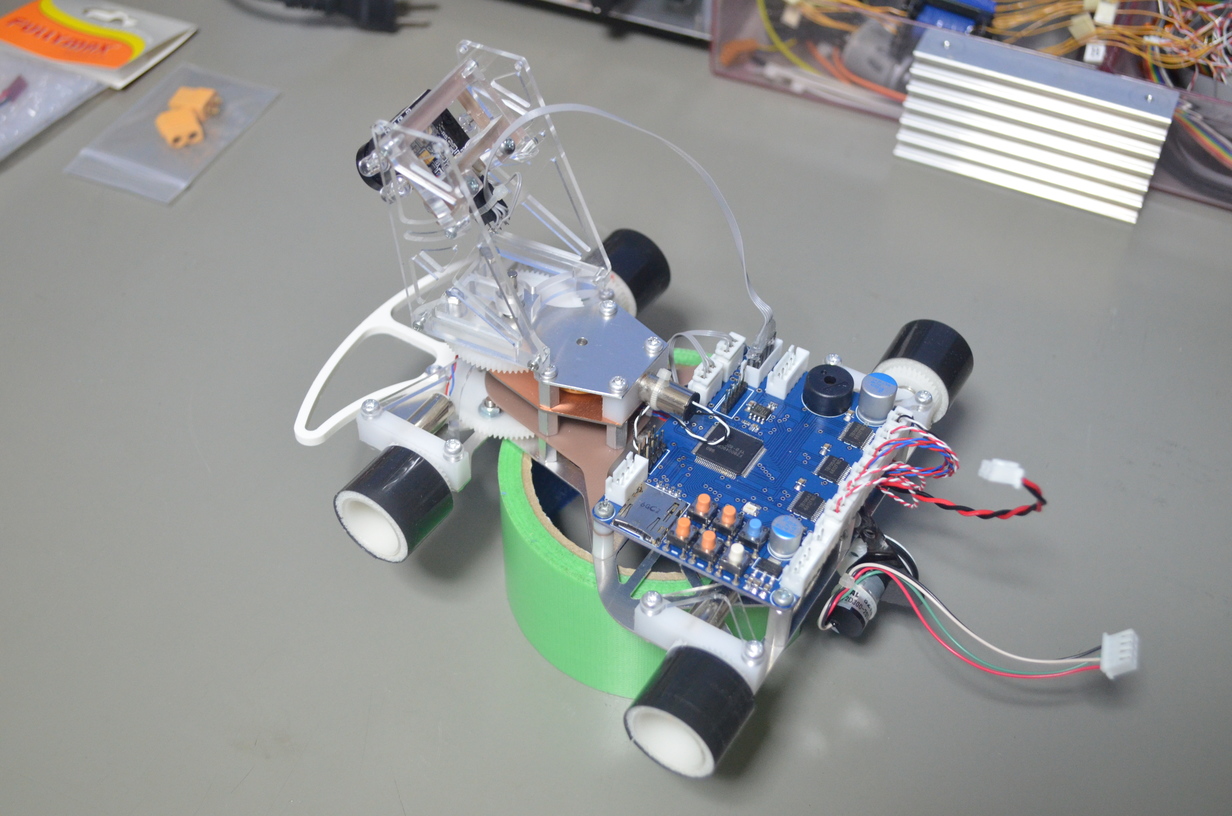
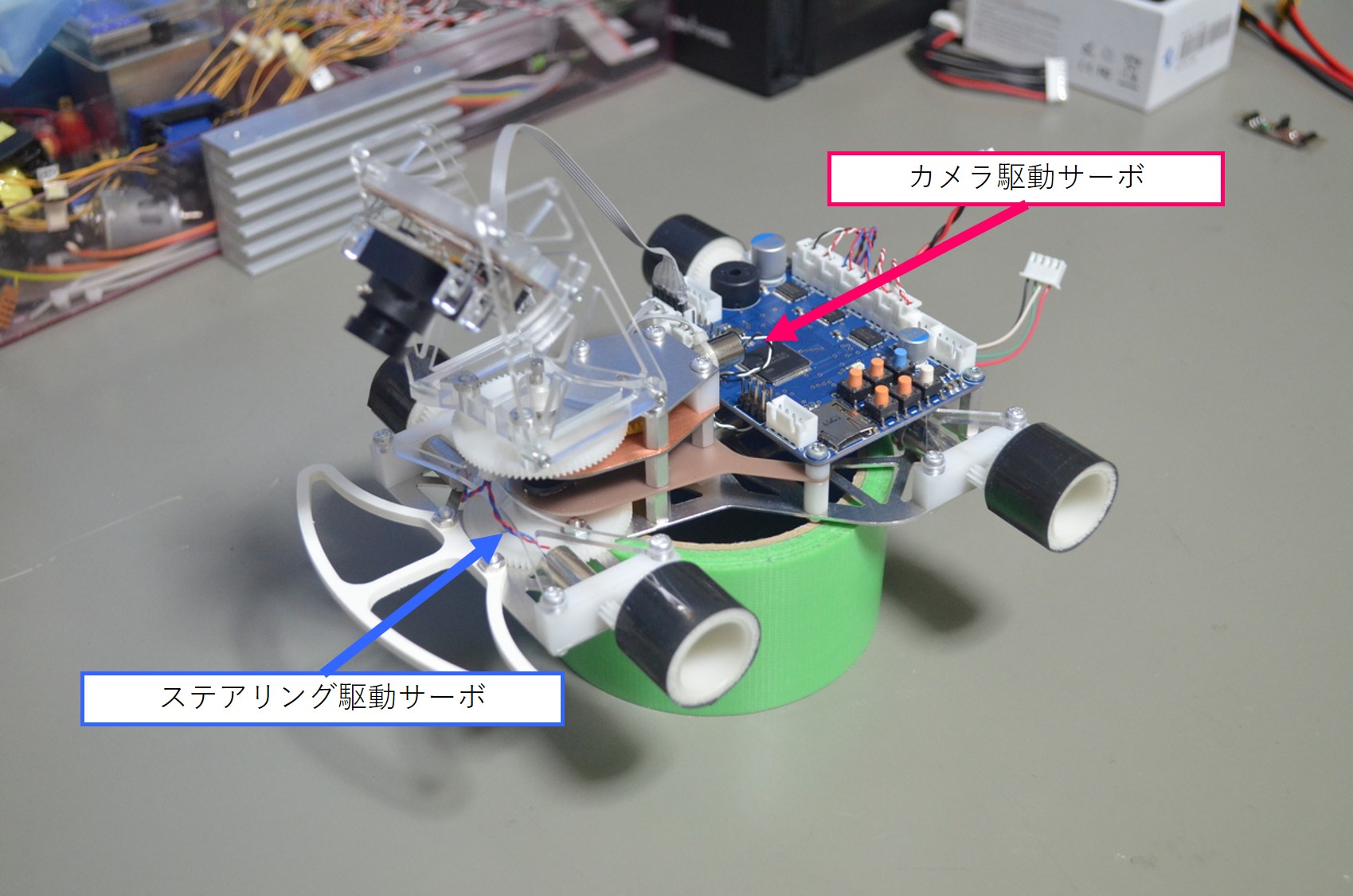
このロボトレマシンには2つのサーボ機構が搭載されています。
ステアリング駆動サーボ、カメラ駆動サーボはそれぞれ
確度センサとコアレスモータによって構成されています。
駆動用のモーターのスピードが上がるとステアリングサーボモータのトルクが不足して
ステアリング動作に問題が発生することが分かりました。
まあ、初めから「ギア比も不足しているしトルクが不足するだろうなぁ」とは思っていましたが
やっぱりだめでした…..
サーボモータのトルク不足を改善するために
ステアリング駆動サーボモータとカメラ駆動サーボモータを変更しました。 .
以下のコアレスモータと同サイズでより駆動トルクの大きなものを選定しました。

Amazon.co.jp: LHI 37000RPM 出力スピード 6cm2本のワイヤ DC3V 8520 コアレスモーター : 産業・研究開発用品
Amazon.co.jp: LHI 37000RPM 出力スピード 6cm2本のワイヤ DC3V 8520 コアレスモーター : 産業・研究開発用品
www.amazon.co.jp
マクソンモータ製の「DCX08M EB SL 4.2V」を採用しました。

「DCX08M EB SL 4.2V」

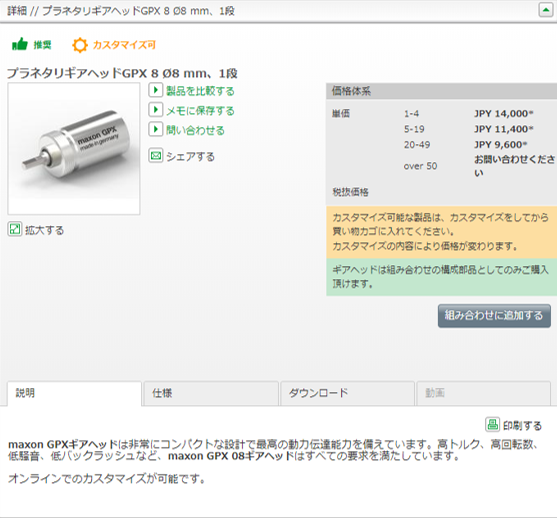
ステアリングサーボ用のモータはさらに高トルクとなるように
ギアヘッドを合わせて注文しました。
「GXP 8 1段」
今は簡単なテストコースしか用意していないので
ベンチーマークコースを作成して調整に入りたいと思います。
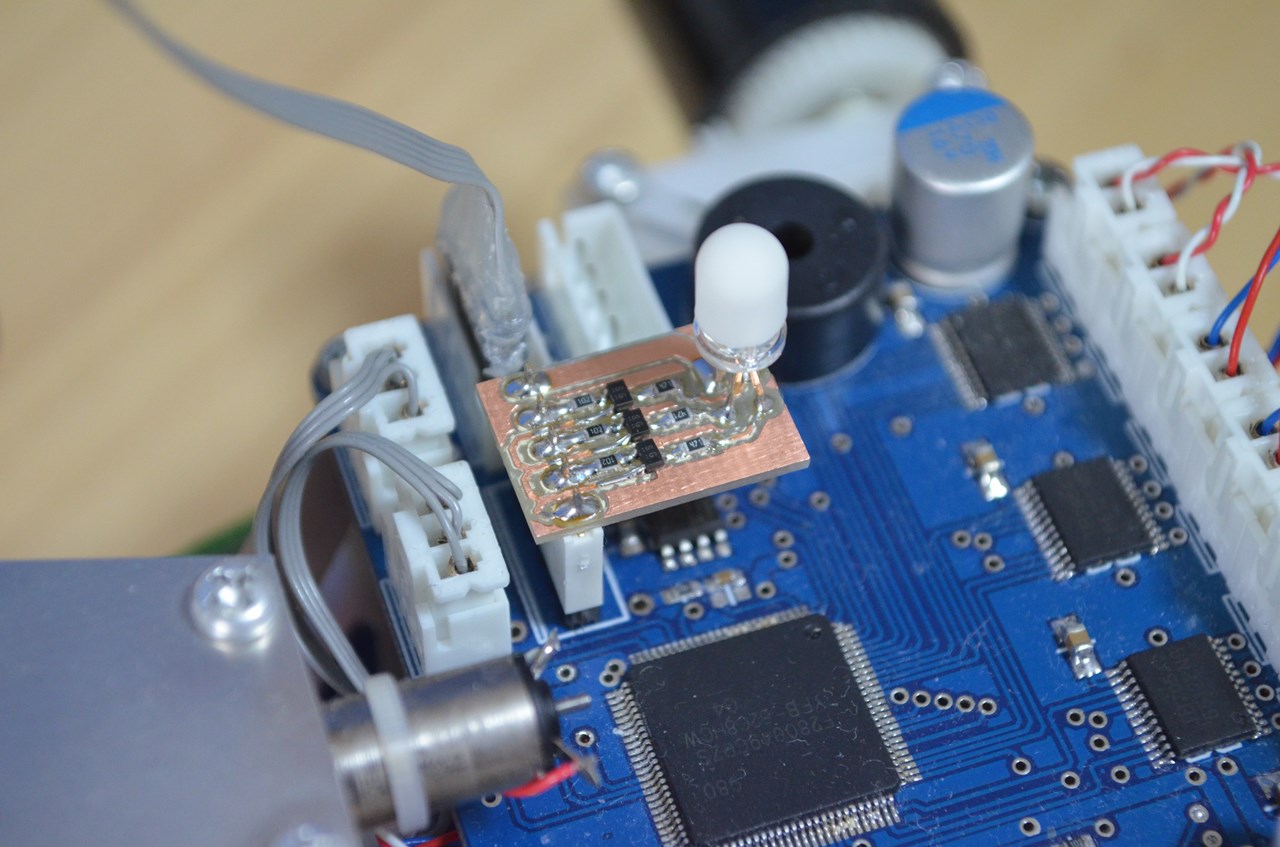
あと、マシンにフルカラーLEDモニタを追加した。
マシン状態を表すインターフェースとしてブザーしかないのは不便でした。
いつものように基板加工機で基板を削りだして適当に作りました。
回路はフルカラーLED「OSTA5131A」とドライブ用のトランジスタ「2SA1586」の構成です。
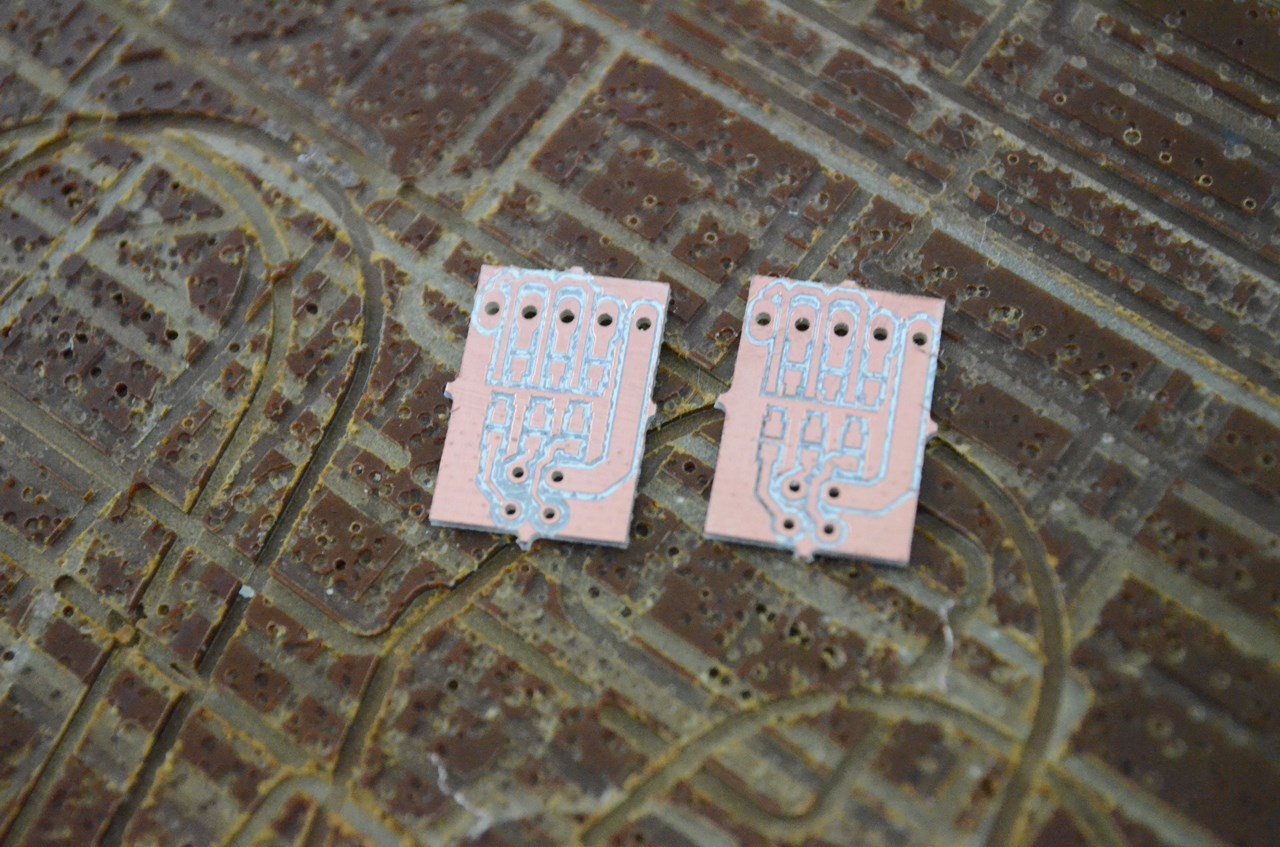
直接コネクタで実装します。


コメント